近期国家在大力组织智慧矿山的关键科技攻关,建设智慧矿山示范工程,推广智慧矿山的理念和技术,制定智慧矿山标准,推动矿山设备制造业的转型升级,实现矿山的本质安全、高产高效、绿色环保。
智慧矿山建设主要包括:智慧生产系统、智慧职业健康与安全系统、智慧技术支持与后勤保障系统建设。
其中智慧生产系统是,包括智慧主要生产系统和智慧辅助生产系统,智慧主要生产系统包括采煤工作面的智慧化和掘进工作面的智慧化,对于煤矿来讲,就是以无人值守采煤掘进技术为代表的智慧综采工作面和无人掘进工作面。对于非煤矿山来讲,可能是以智慧爆破采矿为代表或者以自动机械采矿技术为代表的无人采矿工作面和无人掘进工作面系统。
智慧综采工作面和无人掘进工作面最直观的体现在工作面少人、减人、无人化。首先我们要考虑的是井下封闭空间的特殊性, 由于工作面粉尘浓度较高、照明不足、电磁信号干扰大以及潮湿环境中,机械装备在高频率强震动冲击的工作模式下,现有的智能测控系统设备以及技术方案,无法满足掘进装备在井下全工况环境中,长航时无偏差姿态控制和实时精准定位的技术需求。国内外相关技术团队实际应用测试中,都存在掘进装备在长航时工作状态下定位精度偏差大,安全稳定性不高等问题。
国内外已有报道现有技术方案
/ 激光测距仪+倾角仪
此方案优点是成本低,但是不能给出掘进机掘进头相对于地理坐标系的绝对坐标,当掘进机实际航向与目标航向有偏差的时,只能给出相对变化量;
/ 激光靶标+视觉定位
(1)此方案优点是成本低,只能静态测量工作效率低,受巷道实际工况环境变化影响,长时航向和定位精度容易产生偏差。
(2)激光雷达+倾角仪方案 此方案成本较高,激光雷达能够给出较好的三维点云图,当掘进机偏离地测部门所给的掘进中线时, 此方案只能给出相对变化量,没有绝对变化。
/ 惯导+里程计方案
由于里程计安装在轮式皮带轴上,当掘进机履带有打滑时,就会导致定位不准 进而导致定位坐标不准。
新方案:掘进机航位推算系统
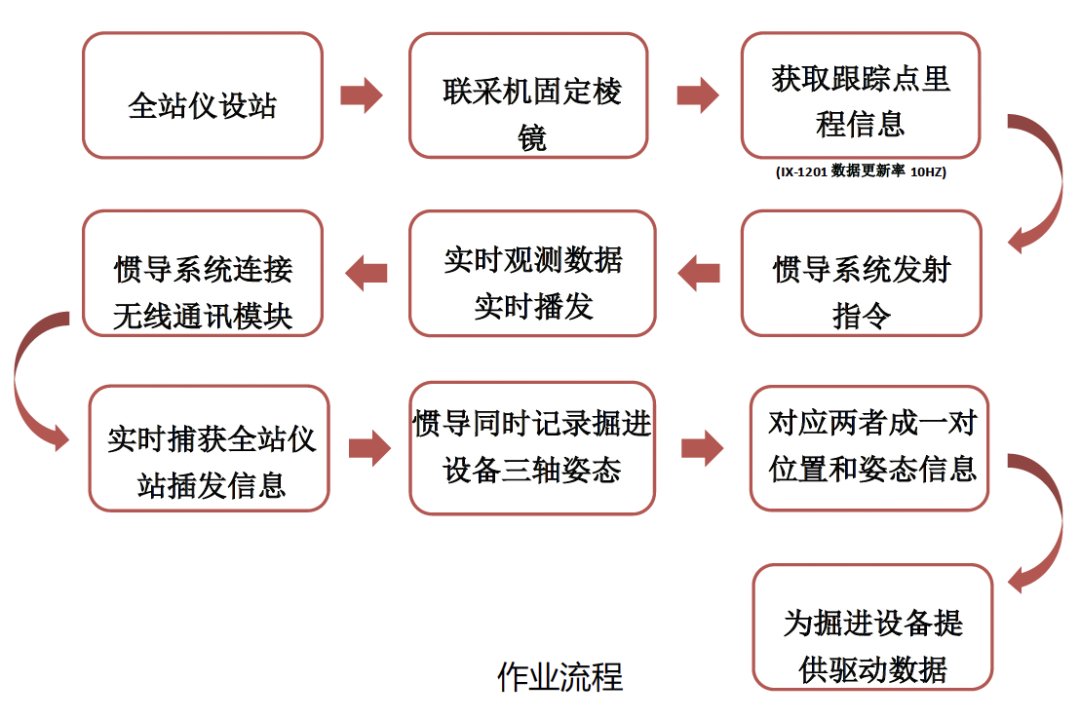
现在SOKKIA的合作伙伴沈阳金图公司与中行天佑公司合作开发出光纤惯性导航+全站仪组合定位系统。创新性地提出了一种基于多传感器的掘进机航位推算系统。掘进机航位推算系统通过对掘进机位置、姿态信息进行状态感知,为后续的的直线度控制系统、电液控系统提供基础数据(掘进机位姿态参数)。
依据工艺要求,将掘进机的偏移量作为几何约束条件,形成基于掘进机位姿态参数、几何约束条件的卡尔曼滤波技术,进而生成直线度控制模型,为电液控系统提供偏移行程量。该直线度控制系统可以完成综掘工作面的高精度自动准直。
IX作为SOKKIA主打的超声波马达全站仪,以其优越的性能在各种工作环境中都游刃有余,在监测、单人测量、BIM放样等等领域都有完美的表现。
掘进机航位推算系统需要全站仪快速准确的获取掘进机的里程、姿态信息。IX凭借其出色的棱镜追踪能力。能够最快实现10HZ/秒的数据更新。可以给掘进机行位推算系统提供高精度即时的三维空间坐标。
本套方案通过IX全站仪提供高精度即时三维空间坐标与惯性导航东北天轴系坐标相融合,叠加测量数据经过系统推算,自动进行实时误差修正,提高了控制端对掘进装备的位姿测控能力以及井下掘进装备姿态实时感知能力,解决了掘进装备井下定位精度低,姿态实时感知控制能力差等系统性技术难点问题。
1、技术可行性
针对掘进装备导航定位关键技术:掘进机惯性导航定位、惯导多源融合定位算法理论、掘进智能控制系统等进行了大量的调研和研究工作,开展了惯性导航位姿解算、掘进智能控 制系统等研究,已开展了掘进机截割路径规划策略、掘进机惯性导航定位等相关技术实际应用并取得良好应用效果。
2、技术先进性
(1)掘进全工况下,导航定位系统的空间位置测量精度:同类产品测量精度在±5~10cm 范围,本组合方案空间位置动态测量精度达到±3cm;
(2)航向角和姿态角测量精度:现阶段国内系统航向角和姿态角测量精度 0.1°,本方案航向角和姿态角测量精度 0.03°;
(3)考虑到巷道复杂环境、掘进工艺和掘进机振动特性,提出惯性导航、全站仪、动态修正、UWB 雷达等多源信息紧耦合的掘进机导航算法,实现无 GPS/北斗条件下的掘进机精确定位定姿。
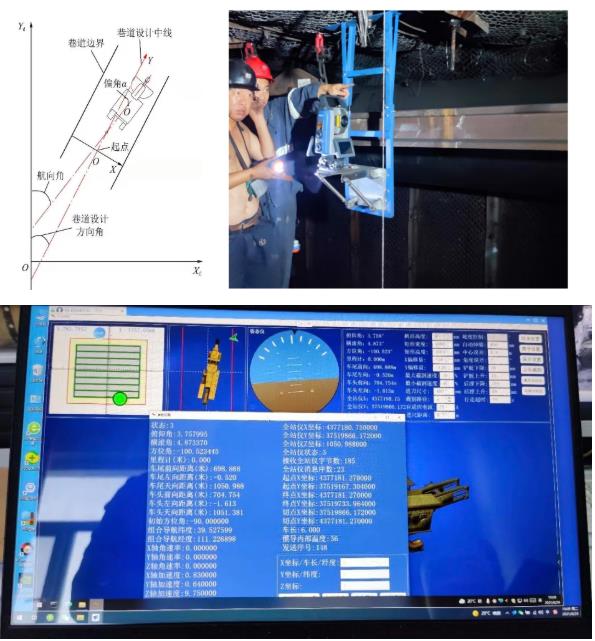
监控平台界面
基于光纤惯导的掘进装备位姿解算及其标定方法。利用数字全站仪测量棱镜位置信息,建立掘锚机全站仪位姿测量模型,进而实现位姿求解。光纤惯导利用其位姿信息实现组合定位。
此系统已在国内多个矿山企业应用:皖北煤电、汾西、陕煤。

联系我们








 18801392970
18801392970