
阿尔法M单体无人船,你以为“极致便携”就是它最耀眼的优点?NO!
作为一条单体无人船,阿尔法M的定位是单波束水下测量工具,是为广大的做基础水下测量的用户而生的。得益于其便携的属性,它非常适合单兵作业来跑河道断面、水下地形等中小型水下项目。
然而极致便携还真不是它最耀眼的优点,极致简单才是!你可能没办法想象操作它有多简单,这么说吧,看完这篇,0基础的你都可以上手开船!
运输简单

阿尔法M无人船,像提旅行箱一样提着一条船!
船重量16kg,船身尺寸90×50×34cm(含摄像头凸起高度)
可轻松放入中/小型轿车后备箱内
至轻至小,单兵作业,来去自在!
准备简单
抵达测区后需要做什么?
测前校准?繁琐设置?不需要的!
安装天线——开机连接——设置RTK
简单三步,准备开浪~
1. 安装天线

3根天线,根据标识完成对应安装
2. 连接无人船
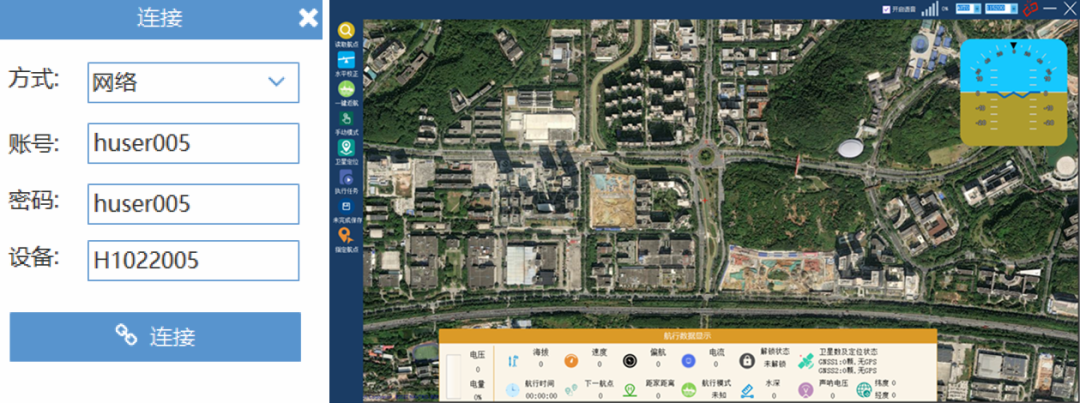
电脑端打开AUSV船控软件,进入设置界面
可通过网络或者电台方式来连接无人船
tips:同时连接,可双重保险
3. 设置RTK
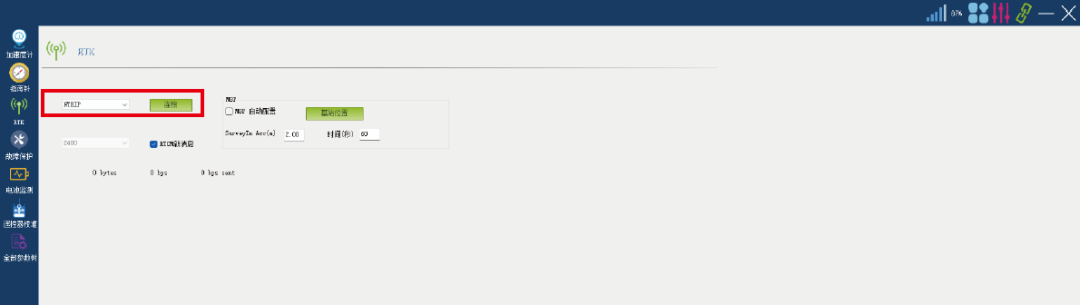
按照默认格式一次性输入CORS账号信息
即可完成设置,网络流量由电脑直接提供
tips:电脑提供网络,可避免出现无人船进入无网区域导致数据缺失的意外情况
操作简单
终于可以下水了!
水下才是真正的考验?是也不是!
只要规划好了,阿尔法M依然超省心!
规划航线——自动巡航——收船
三步完成,就可以收工~
1. 航线规划
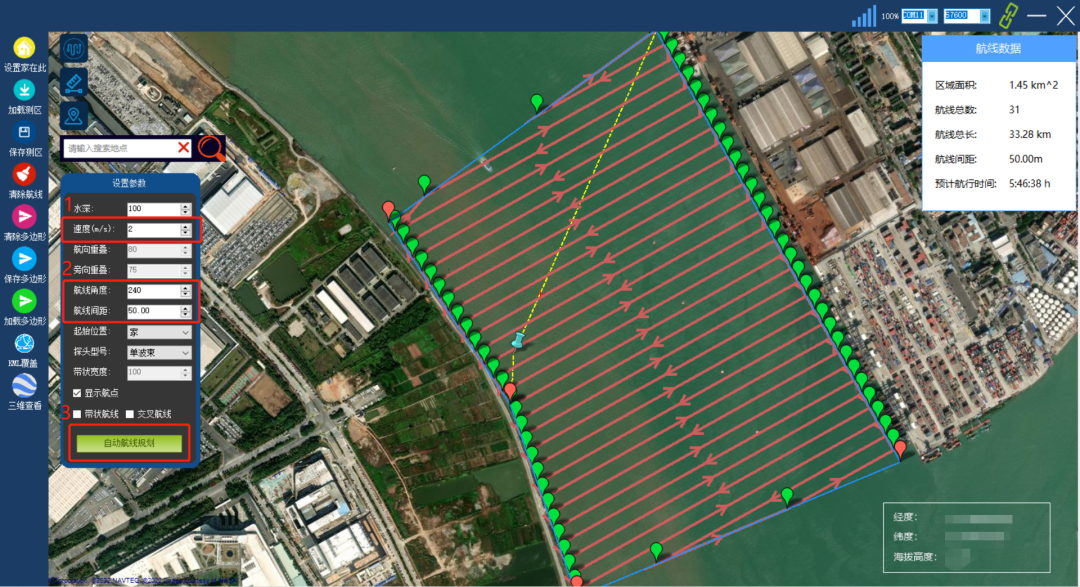
无人船放入水中解锁后,可以在电脑端船控软件上手工画航线,画边界来自动规划等间距航线
还可以导入KML文件作为参考数据,用于航行安全范围等参照
tips: 做内业准备工作时,也可以提前导入KML文件作为航行航线,外业作业便可一气呵成
2. 自动巡航

保存航线后软件端点击“执行任务”,或者遥控左控制杆拨动到自动挡,无人船即可开启自动巡航
一体化的AUSV船控软件
将自动巡航软件和水深测量软件进行整合
整个巡航过程只需要关注这一个软件
就可以实时监测无人船的状态并随时调整姿态走向
3. 省心返航

测量任务结束后手动一键回航
就可以在放船的地方等待收船了
且自动航行过程中已默认开启
低电量自动返航、失联自动返航
自动巡航也能放心浪!
数据导出简单
进入船控软件的下载界面
用USB线连接无人船和电脑
即可按照提示完成数据的导出和下载
整个过程概括来说就是:
连接好无人船后设置RTK→船控软件设计好航线→在能下水的地方把船放到水里→把航线执行打开开始跑→跑完收回来导出数据
流程相当之顺滑,操作非常之简单!
联系我们








 18801392970
18801392970