这项可视化很强的新型测绘手段,在很多应用场景下引起了人们越来越大的兴趣,同时已经被证实是很有潜力与价值的解决方案。例如,我们熟悉的建筑和城市环境、文化遗产与考古、环境与工程监测、林业与农业、制图与建模等科研与工程应用领域都出现了它的身影。

移动测绘系统(Mobile Mapping System, 简称MMS)严格来讲是采集系统与制图系统组成的完整测绘系统,即进行移动数据采集的硬件系统与将所采集的数据进行处理制图的软件系统。
MMS定义了一种空中或地面的移动平台,其中集成了测量系统和传感器以获取地理参考数据。
MMS集成了三个主要的硬件组件:导航/定位传感器、光学传感器和控制单元。如果是与激光器LiDAR结合,则也可以成为移动激光扫描仪(Mobile Laser Scanner,简称为MLS)。这项技术的巨大优势在于可以在移动的荷载平台上短时间内采集大量的数据,是传统测量方式无法匹敌的。
激光扫描仪被放置于移动平台上,以实现多点位高扫描频率覆盖目标并且尽可能避免阴影和盲区影响。移动的激光器与定位系统相结合,可以获得连续的配准与近乎无限的扫描视角。加入相机可以弥补缺少RGB信息的不足,提供更好的可视化3D成果。移动测量系统获得的数据质量取决于其使用的设备,通常可以达到厘米级的精度,但这也受数据采集的速度和距离目标的距离影响。
那么对移动测量系统(MMS)的进一步分类能帮助我们更好的认识和了解它。通常情况,MMS可以根据所使用的移动平台逐一细分——
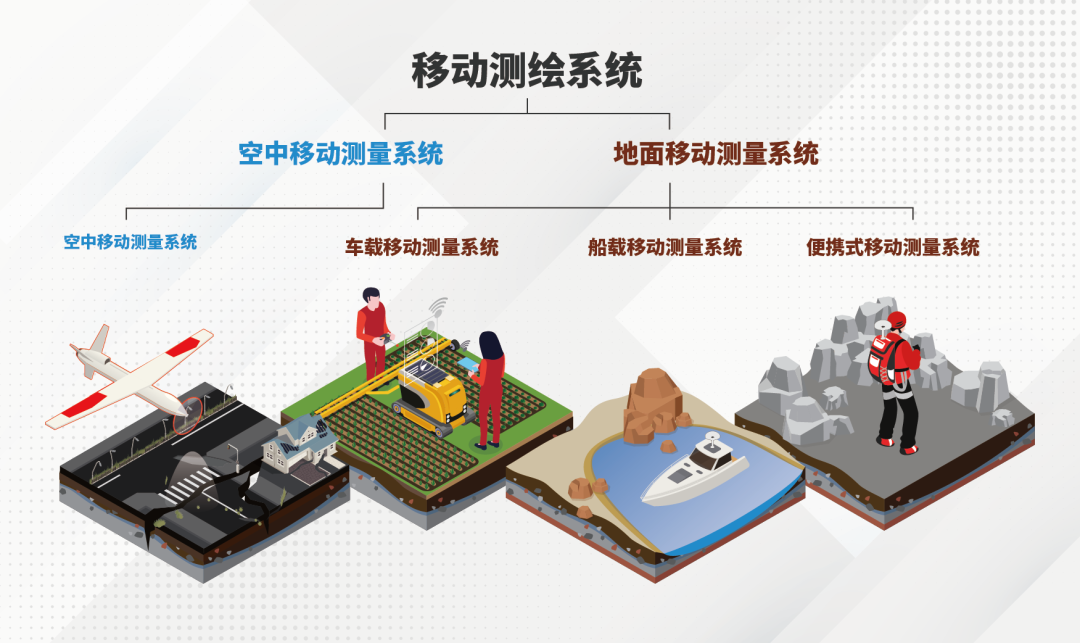
↑ MMS根据移动平台的分类 ↑
我们先对类型较多的地面移动测量系统进行说明:
地面移动测量系统
具体来讲,又有三种移动平台的类型:基于人的、基于轮子的、基于船的。
“基于人的“
是指以人为携带平台,通常称为便携式激光扫描仪(Portable laser scanner,简称PLS)或可穿戴式激光扫描仪(Wearable laser scanner,简称WLS)。PLS是指由操作Wearable laser scanner人员手持携带的下小型设备,例如手持激光扫描仪;WLS是指可由操作人员穿戴的设备,例如背包式激光扫描仪。

↑ 便携式移动测量 ↑
“基于轮子的“
包括手推车、轨道车辆、载人车辆和无人驾驶车(UGV)等。
最常见的为普通车载平台和无人车平台,普通车载平台系统驾驶方便且操作简单,而无人车可以通过遥控或规划路径用于人无法轻易到达的地方,从而克服困难的地形。
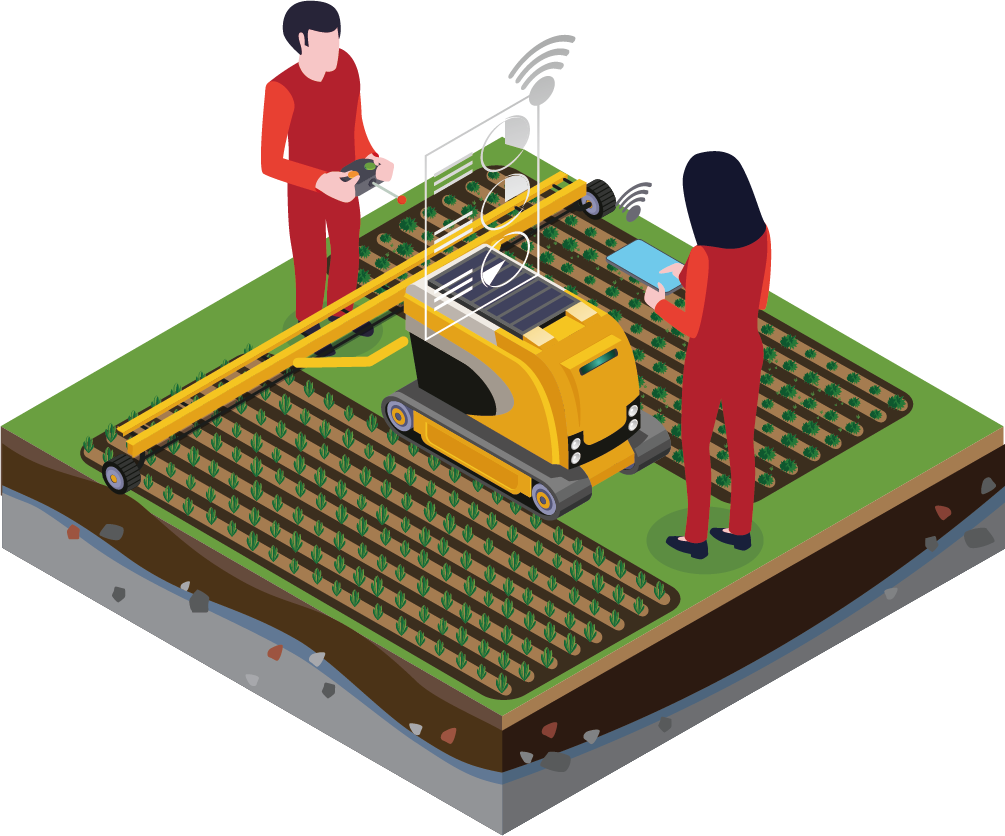
↑ 车载移动测量 ↑
“基于船的“
仅在特定领域或环境中使用,如无人船测量系统。

↑ 船载移动测量 ↑
对比地面测量系统,空中测量系统又有什么特别之处值得我们去注意的呢?
空中测量系统
机载移动系统通常被称为空中激光扫描仪(Airborne laser scanner,ALS),这种机载平台搭载的激光单元往往与地面移动平台所配备的激光单元有所不同。
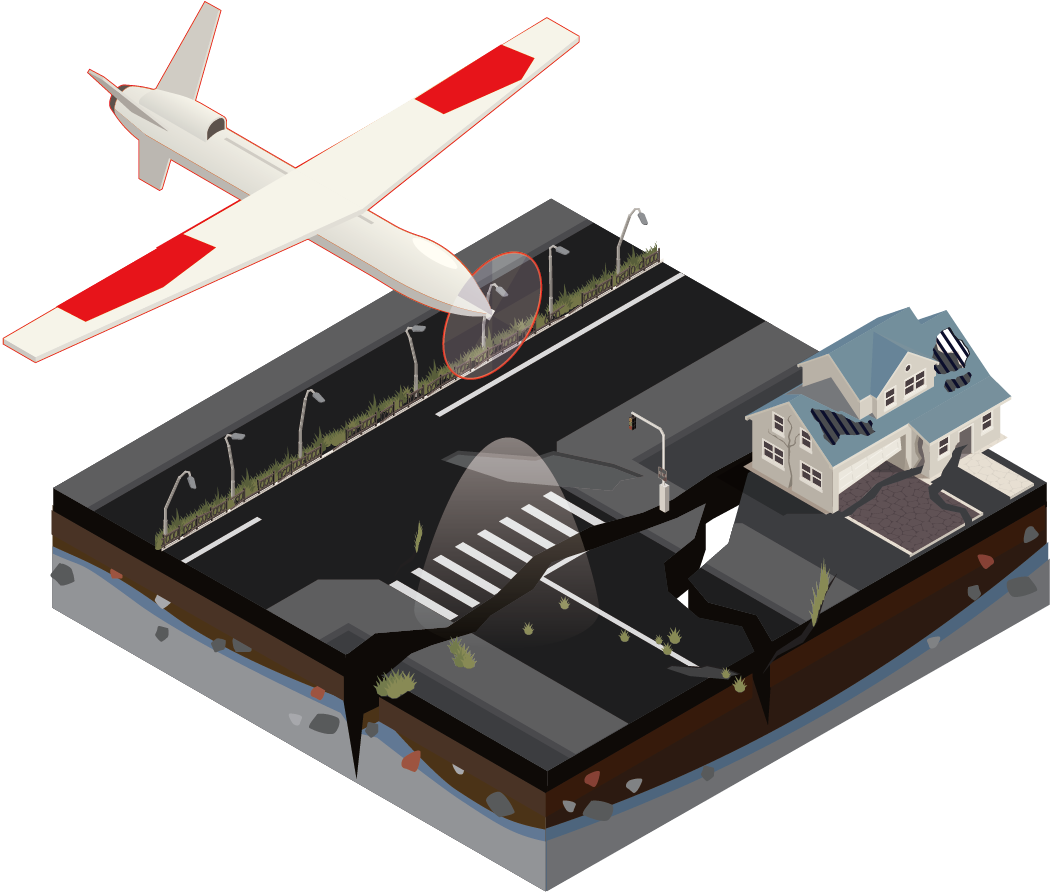
↑ 机载移动测量 ↑
那么机载平台有什么优势呢?我们一起来分析看看:
“第一“
机载平台的激光器往往有更长的测距范围,因为有的应用环境需要达到一定的飞行高度,当然长距的激光器很难达到中距激光器的精度。一般定义的长距激光器的有效测距量程在200m以上,而最常使用的地面移动测量系统和低空无人机荷载平台搭载的多为中距激光器,一般有效量程在80~120m。
“第二“
由于机载平台视角的特殊性,所使用激光器的视场角也常不同于地面平台。因为地面移动测量系统往往需要更广的视角以在单次车程获取尽可能多的周边目标信息,所以会配备360°视角的激光器。当然,随着机载平台应用领域的增加,在非俯视扫描的场景下全视场角也提供了更高的作业效率,比如将全视角的旋转式激光器应用到无人机载具上的方式。
移动测量系统(MMS)技术的发展得益于近二十年中导航系统的改进与推动,其中全球导航卫星系统GNSS和惯性测量单元IMU确保了三维激光扫描数据的正确地理参考定位。
GNSS接收机提供来自卫星信号的定位和时间信息以确定位置。惯性测量单元作为一种低成本的运动测量方式获得了显著普及。IMU测量线性加速度(三轴加速度计)和旋转速率(三轴陀螺仪),可以通过数值积分来提供三维位置和方向。
结合位置数据,IMU允许将系统的局部框架中的点数据转换到地心地固坐标系统中,因此来自IMU的补偿将对所有被投影到一个通用框架中的点云的几何质量产生直接影响。然而实际应用场景的复杂多样,有时会导致部分特殊场景或数据采集环境无法提供有效的GNSS信号。
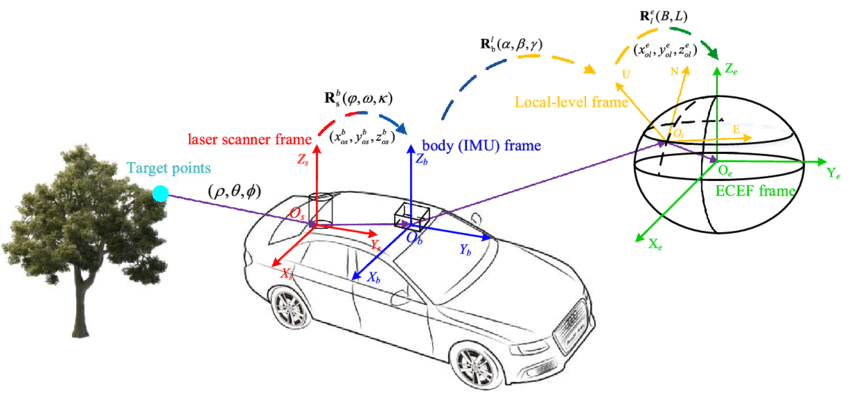
↑ 三类坐标框架的关系 ↑
为了提高定位精度并消除无GNSS信号环境中的定位错误,开发人员在数据和模型两方面进行了重大改进。前者是直接从地面控制出发并使用多种校正算法来修复点云数据,后者则是为移动测量系统(MMS)建立数学模型以分析误差因素从而完成偏差校准。
在过去的十年中,机器学习技术中已经研究出了同步定位和制图(SLAM)算法,可以在定位移动平台的同时生成地图。SLAM技术有两种主要策略:
1
使用特征匹配的绝对定位
2
使用扫描匹配的相对定位
需要注明的是,提高精度的前提都需要有控制点引入的闭环测量。
目前的SLAM算法在室内应用时的表现更好,因为其环境有规律和重复的特征。而在室外应用时,由于环境的复杂和不规律,其表现并不佳。这种不规律性常常会产生跳动偏移或扫描缺失,这对计算负载和算法设计是很大的挑战。
但将GNSS/IMU系统与SLAM的结合应用将提供一种提升很大的解决方案,不仅可以在GNSS信号较差的场景下减少导航偏移,还可以提供SLAM算法无法提供的绝对定位信息。
天硕导航在专注于GNSS/IMU导航定位系统的同时,也在致力于提供一套强大的移动测量系统,完善一系列无人机、车载、背包等的多平台解决方案。

联系我们








 18801392970
18801392970