地铁是城市公共交通的骨干,具有节能、省地、运量大、全天候、无污染(或少污染)又安全的特点,属绿色环保交通体系,地铁轨道交通网能更好的发挥组合优势和网络效益,特别适应于大中城市。截止2022年2月,31个省(自治区、直辖市)和新疆生产建设兵团共有51个城市开通运营地铁轨道交通线路272条,运营里程8819公里,实际开行列车259万列次,完成客运量15.6亿人次,进站量9.5亿人次。
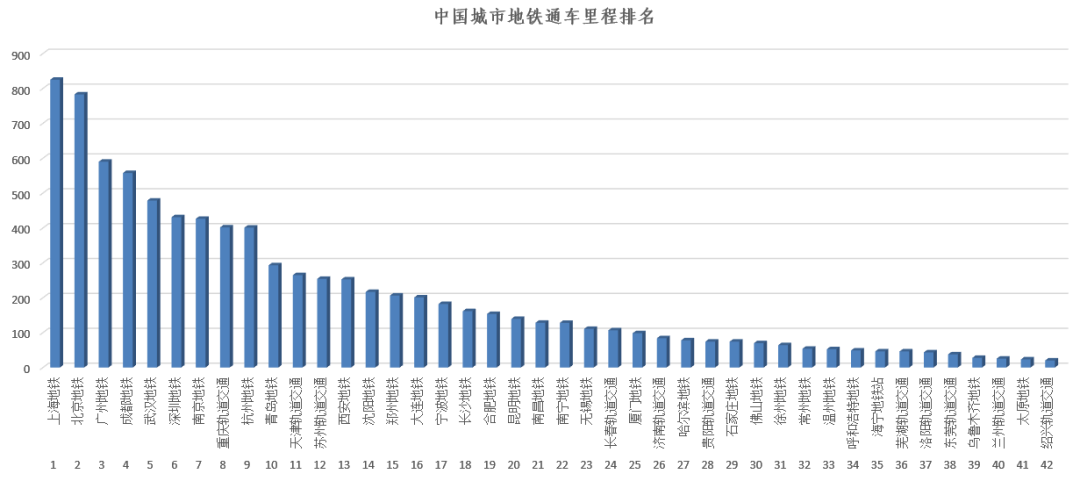
中国城市地铁通车里程排名
我国正处于城镇化进程快速发展时期,城市人口快速增长,交通压力日趋加大,一些特大型城市交通拥挤、阻塞的矛盾非常突出,地铁轨道交通已成为越来越多的城市缓解交通问题的首选方案。但近年来全球地铁事故不断发生,我国的北京、上海、广州、武汉等城市地铁也先后发生过事故,造成了重大经济损失。


地铁管涌和环片击穿事故
地铁轨道交通安全因素从整体上来看分为建设期间安全影响因素和运营期间安全影响因素两大类。建设期间安全影响因素主要包括建设期间地铁车站、地铁区间、周围环境等影响因素;而运营期间安全影响因素主要包括周边施工安全影响、自然灾害、人为事件、火灾、运营故障等影响因素。


地铁结构外部施工经常会导致地铁安全受到影响

地铁轨道运营安全的管理的重点除了提高城市轨道交通安全保障和促进全国城市轨道交通安全管理水平的提升以外,针对建设期和运营期的地铁轨道交通设施进行安全监测是必不可少的。我们可以将地铁轨道交通安全监测分为地铁轨道交通施工期的施工监测、运营期的日常运营监测以及周边由于其他建筑结构施工而产生的地铁保护区安全监测。对于地铁轨道交通安全监测来说,保护区监测是最常见的自动化项目类型。
01

地铁保护区项目中工作的
索佳NET05AXII自动化测站
地铁保护区自动化监测的重点项目一般包括“商圈高楼基坑施工”、“隧道下穿”“换乘车站”、“交通枢纽”、等项目类型。除了受影响的城市轨道交通结构,正在进行施工的结构也是需要进行监测的。监测单位通过对比地铁结构的安全监测数据和外部施工的进度节点与施工监测数据,可以做到数据对照,甚至指导外部结构施工的目的。

立体交通枢纽项目
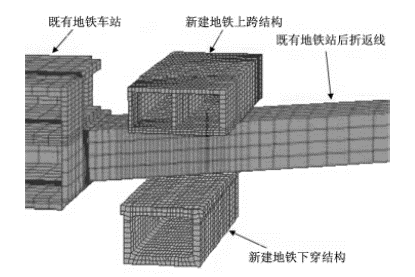
地铁下穿项目
地铁保护区自动化监测系统需求:

隧道区间中工作的索佳NET05AXII自动化测站
02

索佳地铁自动化监测系统架构图
整个监测系统分为两大部分:

NET05AXII不仅拥有超高的测量精度和超快的测量速度,还具备棱镜就近照准技术,在视窗内自动照准距离测量波束最近的目标,配合现场施工手段,完美解决了地铁隧道内棱镜小视场角问题。
此外,NET05AXII还兼容本地化解决方案,便于针对不同监测、测量项目类型的开发需求。
监测终端:
监测终端安装于监测现场,接收监测平台指令,并可以自动向测量机器人发送指令。通过测量机器人和监测终端的组合,即可完成测量的自动化。监测终端具备:仪器配置、远程遥控、自动采集、数据传输、数据备份、硬件监测等功能。

索佳IControl-T监测终端
主要参数:

FMOS监测平台
主要技术参数:
CS构架、支持全自动化、以及自由设站的半自动化监测;
多项目、多站点管理、联测坐标推算;
智能判别超限、点位遮挡智能判别;
原始数据存储与分析;
多点多周期的单点变化、累计变化曲线分析、周简报自动生成;
03
原理:
通过在地铁保护区监测项目实际影响范围区间内,按照一定的断面间隔(按照影响程度一般间隔5-15m一个断面)安装监测棱镜,每个断面一般安装4-8个监测棱镜。在影响区域外,布置若干个基准点棱镜。

监测断面棱镜安装示意图
实施流程:


除了专家论证评审会外,一个地铁保护区项目的实施过程主要还包括以下几个阶段:
01 病态调查
对地铁保护区项目受影响区段进行详细的病态调查,及时发现环片裂隙、渗水等病害问题。病态调查也是作为监测前后区间资料留存的重要途径。在病态调查过程中,还需要及时确定现场影响区间范围,并做标记。
02 选择设备及基准点位置
施工开始的第一步,就是根据确定好的监测区间,制定出测量机器人设备的最佳安装位置,设备的位置应保证能监测到所有的监测目标。根据仪器的位置确定基准点的安装位置和朝向。若单台设备无法满足整个监测区间的要求,则需要布置多台设备进行联测。地铁联测的要点请参考公众号分享的历史文章。
03 确定安装断面
根据断面布设要求,安装每个监测断面的监测棱镜,安装过程中必须注意棱镜的稳固和镜面朝向。
04 初始值学习
对仪器进行初次定向,建立相对坐标系。保证采集每一个基准点和监测点的坐标,导入监测平台中,作为设备的初始值。自动化运行阶段,测量机器人自动找寻目标即是通过初始值换算出的角度进行寻点。初始值采集时,对于被遮挡或者存在小视场角而无法相互分辨的棱镜目标,应及时调整位置。
05 试运行
采集所有的监测初始值后,应进行数周期的试运行,保证整个监测系统稳定。由于人工定向和后方交会出的坐标差异,试运行的数据还用来更新监测点的初始值,以确保监测点的变化量从0附近开始。
06 正是运行
按照规定要求,设置好监测周期和自动采集时间,配置好限差和预警值,即可开始地铁保护区项目的正式运行。系统并自动生成每天的综合变化报表,监测技术人员只用每天按时提交至业主和建设方即可。
04
1、列设备清单:
由于地铁保护区监测项目需要的设备众多,除了监测设备外,还需要大量的棱镜、膨胀螺丝、电钻等施工器具。携带少任意一种设备,都会耽误工期。

进入隧道施工前实施工具清点
地铁隧道中施工时间紧张,并且不同的工程步骤一般都需要多人配合,因此在项目作业前,必须分配好施工小组,明确到具体责任人,保证不同的工序之间保证顺畅。

3、绘制安装断面:
实施进场后,确定好每个安装断面,可以使用粉笔或喷漆绘制每个断面的位置,后续施工小组可以快速进行打孔作业和安装棱镜作业,整个实施变成流水线形式,可以大大提升实施效率。


7、学点与调整:
使用3-4人的学点小组,可以最大化学点效率。在设备位置学点人员在指点人员的指引下,依次采集所有的监测点目标。对于小视场角的点或者遗漏点,学点人员立即通知指点人员进行点位的移动或者补漏。学点人员可以利用采集的坐标初步判断采集的坐标时候是正确的目标棱镜。

例如相近的两个断面的点北坐标应相差大致一个断面间隔的数值,同一断面的点北坐标应接近,东坐标和高程则存在明显差异。
8、定期检查点位稳定性:
由于是采用后方交会定向的方式,因此首先要保证的是基准点的稳定性。监测运行人员应定期校核基准点的稳定性,FMOS支持拟稳平差算法,通过对基准点的组合校对,可以自动判别出变形量最大的基准点,并对其进行重新采值,保证这个监测系统坐标的稳定性。同时,由于地铁隧道内存在维护人员的活动,监测人员可以在日常的人工巡检和人工复测过程中,检查监测点的稳定性并清洁棱镜表面,对已经活动的监测点进行坐标重新采集,并在FMOS中进行变化量的继承。

持续增加的应用案例···
关于:拓普康索佳

转自:拓普康索佳
病态调查
联系我们








 18801392970
18801392970